.svg)


療】-1739009518.webp)
療1】-1739171526.webp)
療2】-1739009905.webp)
療3】-1739170138.webp)
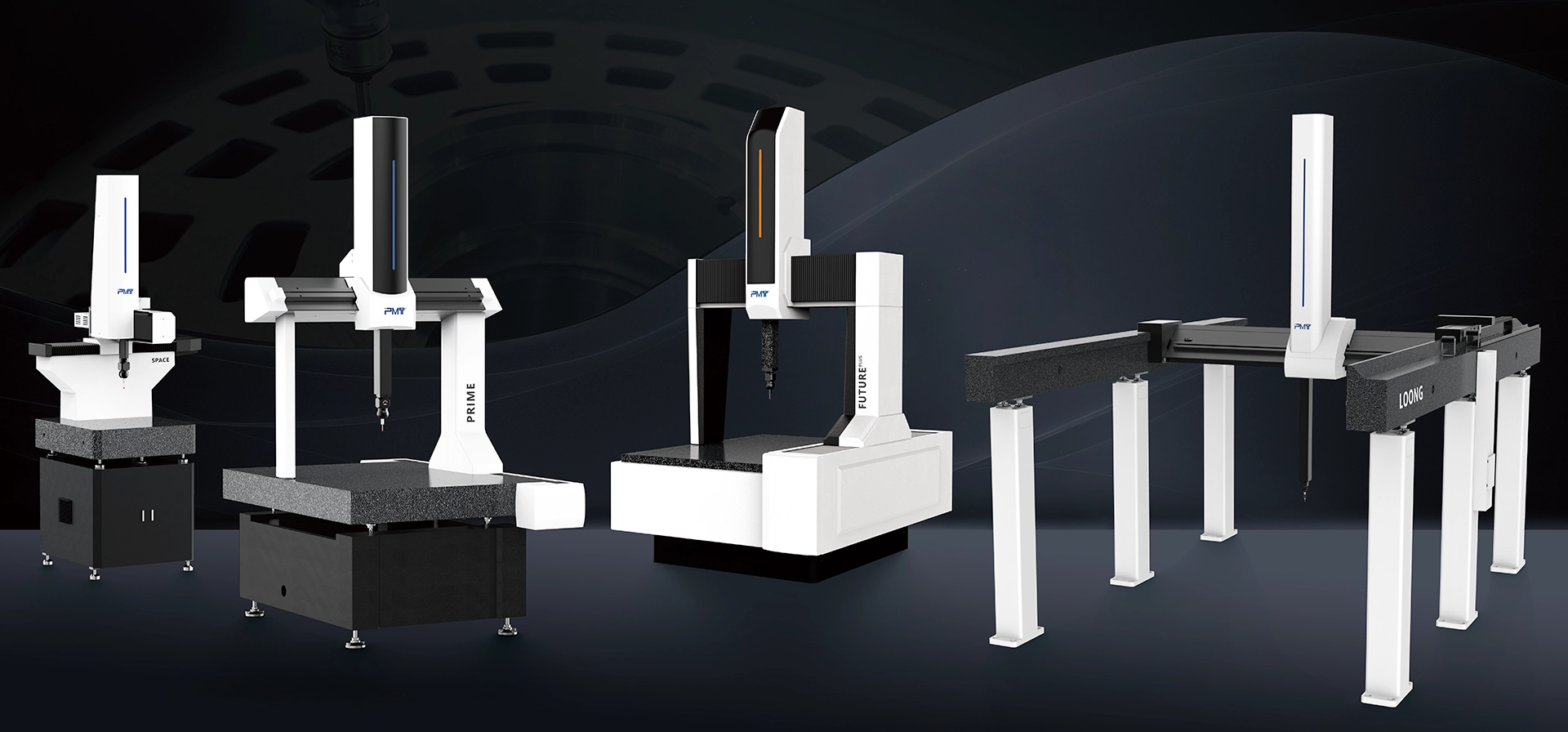
In the field of surgical robots, the trajectory detection is widely used to evaluate the positional accuracy and repeatability of the robots. For example, in applications of surgical robot based on image navigation and positioning, researchers use a portable coordinate measuring machine to evaluate the position and repeatability of the robot in different postures. Experimental results have shown that this method helped improve the positioning accuracy of surgical robots effectively and increased the rate of success in surgeries.
療】-1739010364.webp)